See the original Microbot Controller
page for more info about this program and the Microbot Robot. Note
that this version still requires PocketC, just like the last one.
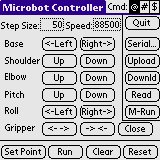
Version 2.0 includes two programs, the controller and Mbot-set:
Note that there are 3 new Palm radio-buttons in the top left of the controller. These allow the user to select the "command symbol" to be sent to the Microbot.
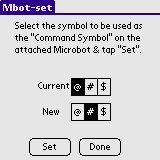
The Mbot-set program can be used to set/change the Microbot's command symbol. It makes use of the "@ARM" command. Note that turning the power off and on again resets the command symbol to the default "@".
USAGE
To set up Microbots in a daisy-chain network, you first need to tell which
Microbot what command symbol to listen for. This is best illustrated with
an example: Say you have 2 Microbots, A and B. You want to connect the
Palm to A, and then A to B, like this:
Palm --> A --> B
Next, you want Microbot A to use the default "@" command symbol, and Microbot B to use the "#" command symbol. What you need to do first is connect the Palm with a serial wire to Microbot B and run the Mbot-set program. Select the current command symbol (which should be "@") and the new one you want to reset the Microbot to ("#" in this example). Tap the "Set" button and then "Done".
Now, you need to set up the wiring, like so:
Palm --serial--> A --serial--> --NULL--> B
Note that you need a nullmodem connection between Microbots A and B in order for B to work. I have not tested a setup with 3 Microbots, but assume a null will be needed there as well.
That's it! Now just select the command symbol at the top of the controller software to move each Microbot independently.